")
")
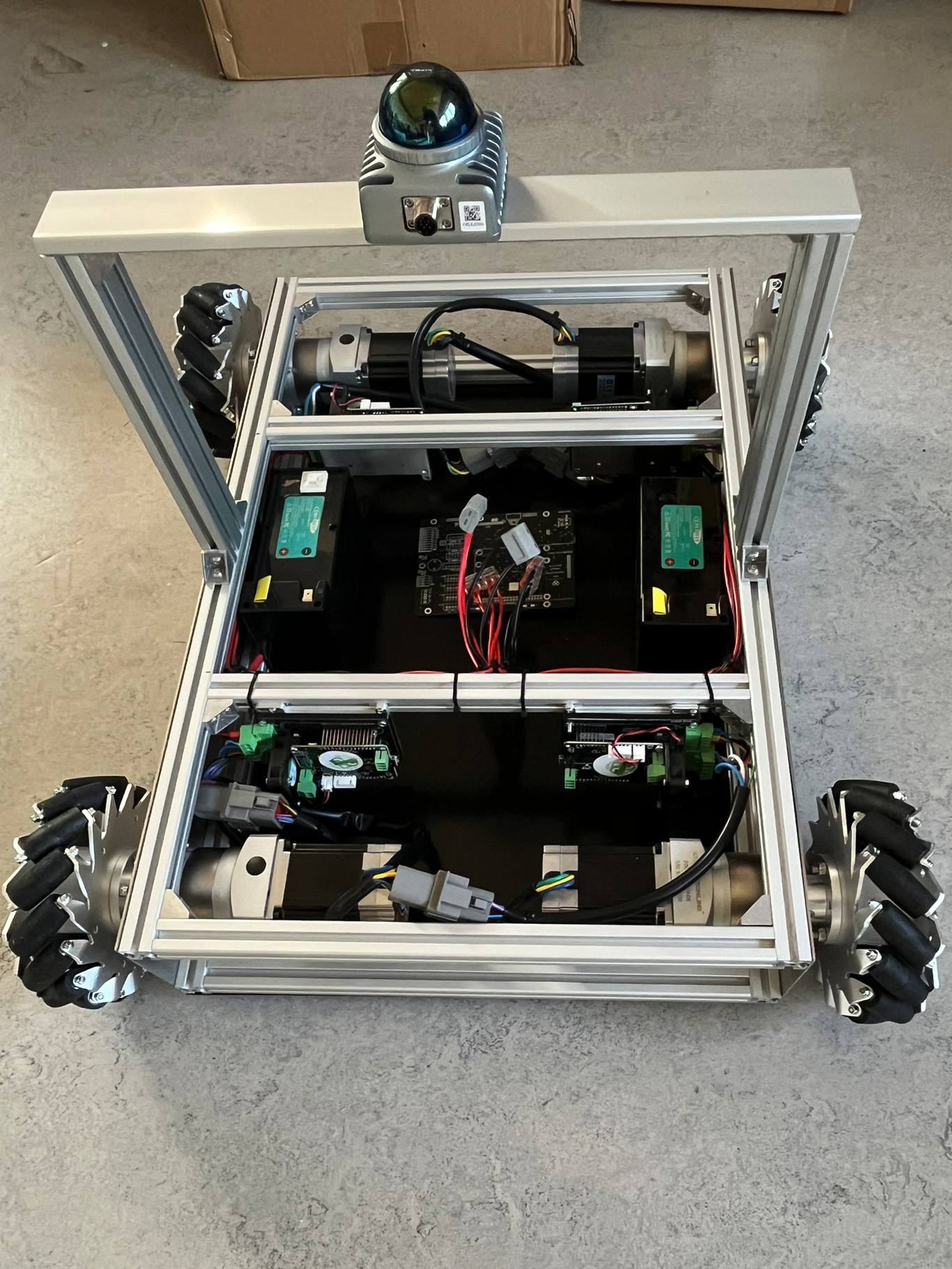
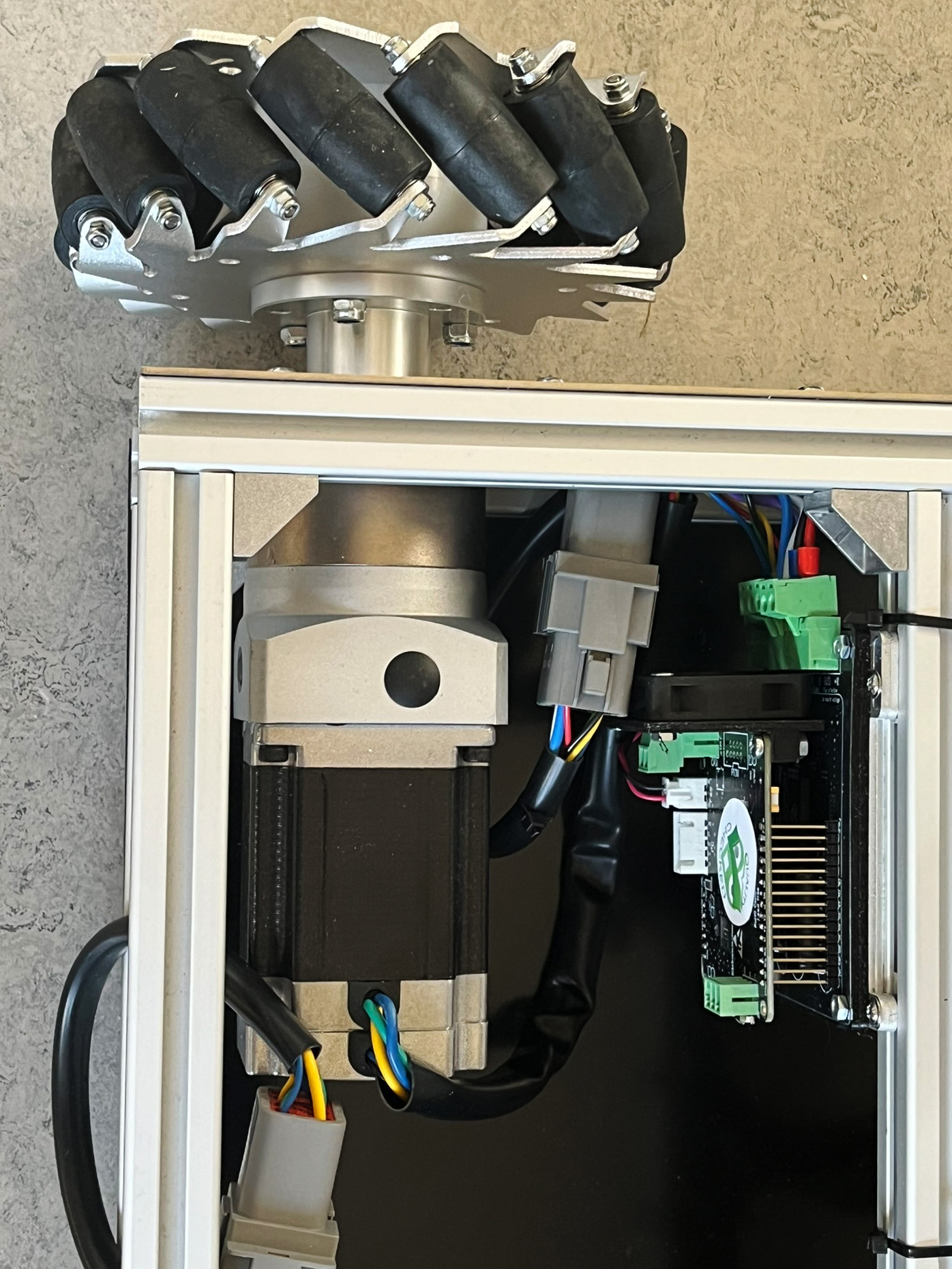
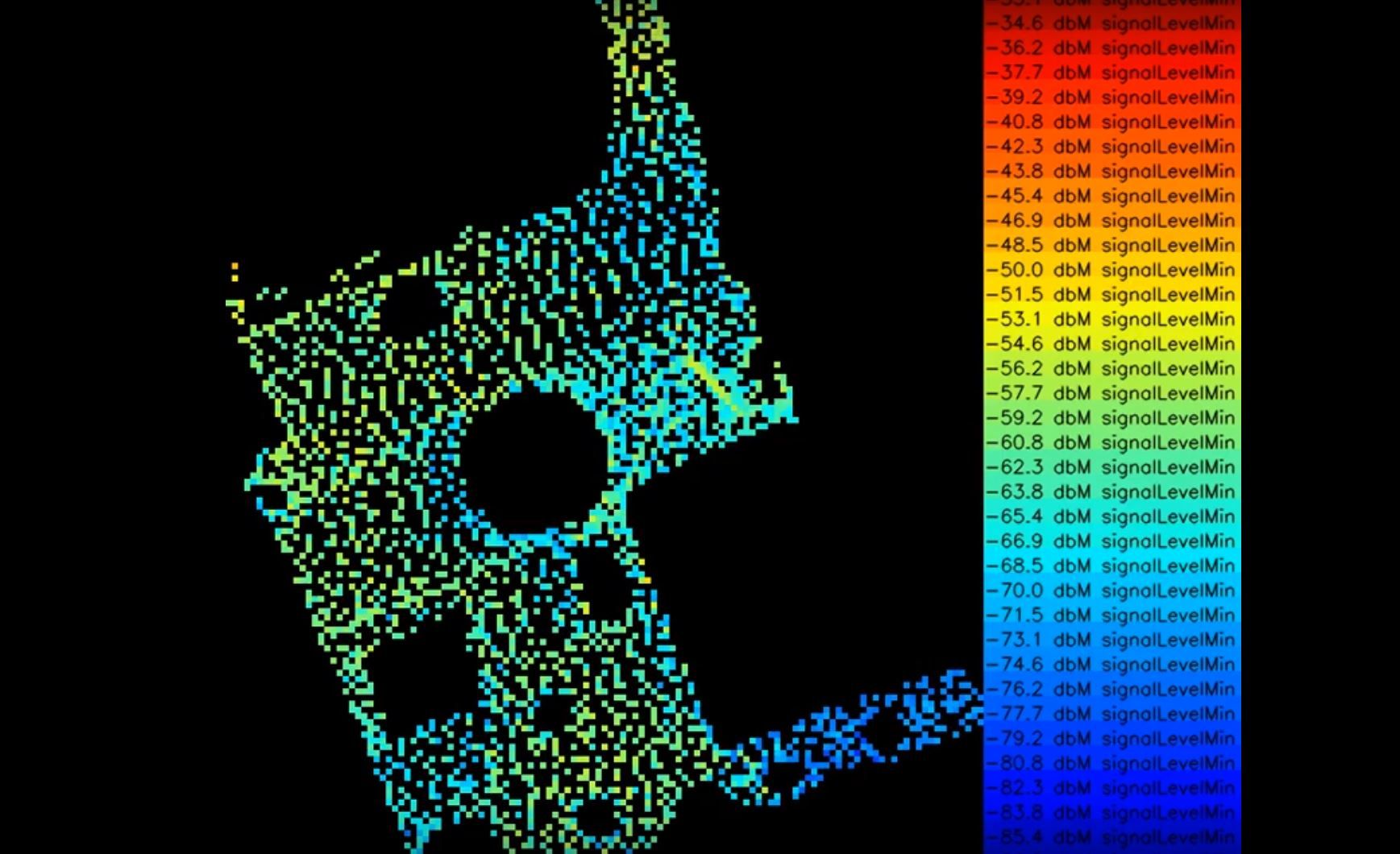
With our innovative mechanic, we have developed a basis for an XL robotic lawn mower, which becomes a very high-quality professional device thanks to the owrRobotics hardware and software. The entire mechanism consists of precisely lasered and welded aluminium and stainless-steel sheets, which guarantees a very long service life of the robust mower. The concept is based on sustainability, defective components can be repaired or replaced easily and inexpensively. The module architecture of the owlRobotics Kit makes a simple electrical setup possible, despite complex functionality. And the further developed software for robotic lawnmowers called Sunray also supports the new functions such as the electric mowing height adjustment. In addition, there will also be new features, such as navigation and obstacle detection with LIDAR. The owrRobotik concept ensures that new functions can also be retrofitted to mowers already in use, which ensures that the value of the device is retained. In this video we have captured the very first test drive of the mower. Even though the Sunray software is already installed, the mower is still controlled purely manually, because we would not have expected this consistently positive and successful test. Contrary to our expectations, even 20-30cm high grass is no obstacle for the mower.
- Projects & News
- Hits: 8966