")
")
Robotics Made Simple
Developing autonomous robots is often a complex task. Different drive systems, sensors, motor controllers, and communication protocols require developers to spend significant time integrating hardware before they can focus on the actual application.
owlCore takes a different approach.
Instead of dealing with low-level hardware control, developers work with a collection of intelligent, reusable function modules. The application simply defines what the robot should do – owlCore automatically determines how it is executed on the configured hardware platform.
From High-Level Commands to Robot Motion
A typical example is vehicle control.
The developer simply specifies the desired speed and steering direction. owlCore automatically calculates all required control values depending on the selected drive system.
For example, owlCore handles:
- Motor control for differential drive robots
- Steering angle calculation for Ackermann steering
- Motor controller communication
- CAN bus communication
- Hardware-specific parameter conversion
- Automatic adaptation to different robot platforms
As a result, the application remains independent of the underlying hardware.
One Framework – Multiple Robot Platforms
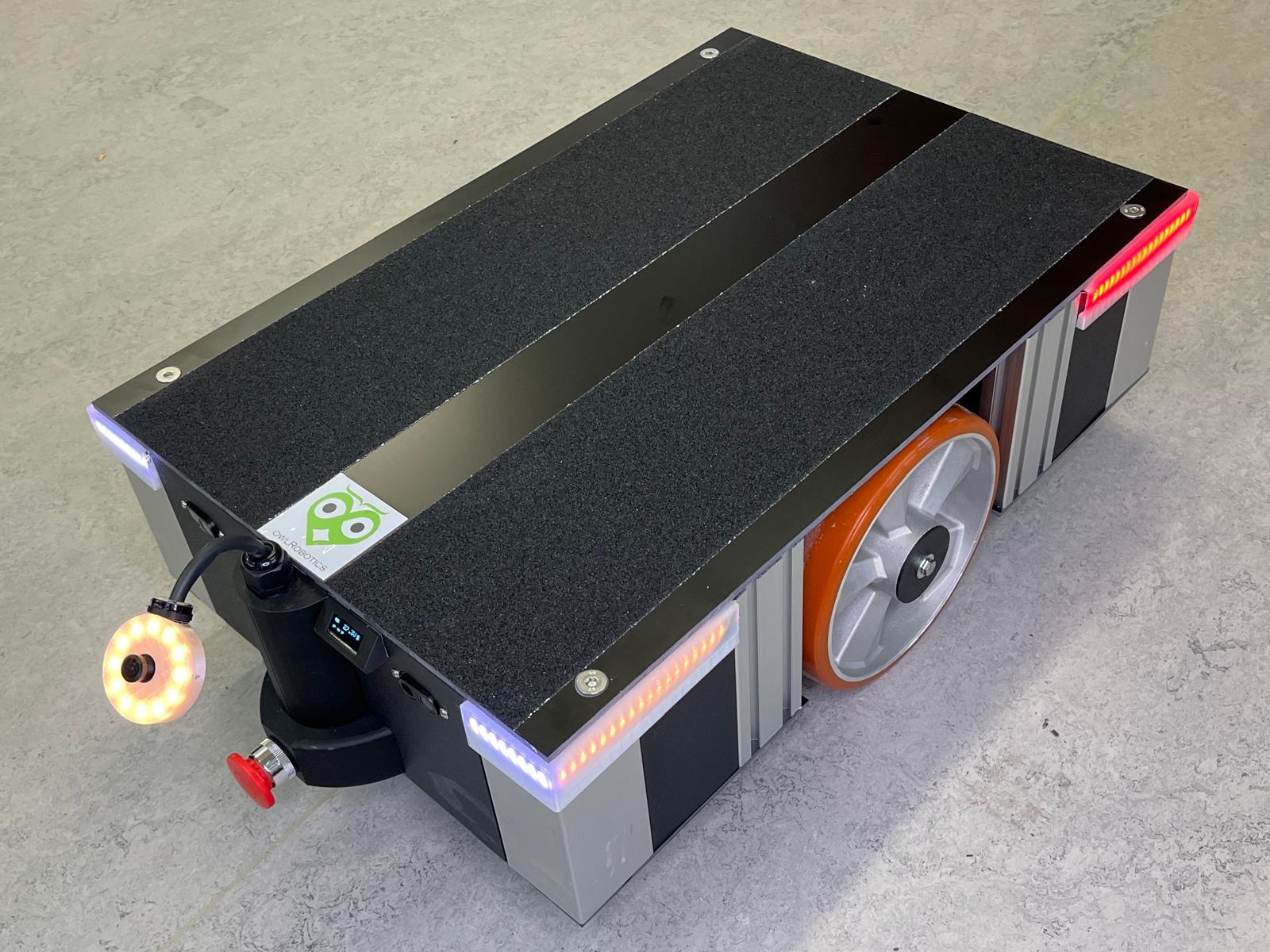
owlCore has been designed for autonomous mobile robots and supports a wide variety of vehicle concepts.
Typical applications include:
- Autonomous lawn mowers
- Service robots
- Transport robots
- Educational robotics platforms
- Research projects
- Industrial mobile robots
- Custom robotic systems
The same application software can be reused across different robot platforms without modification.
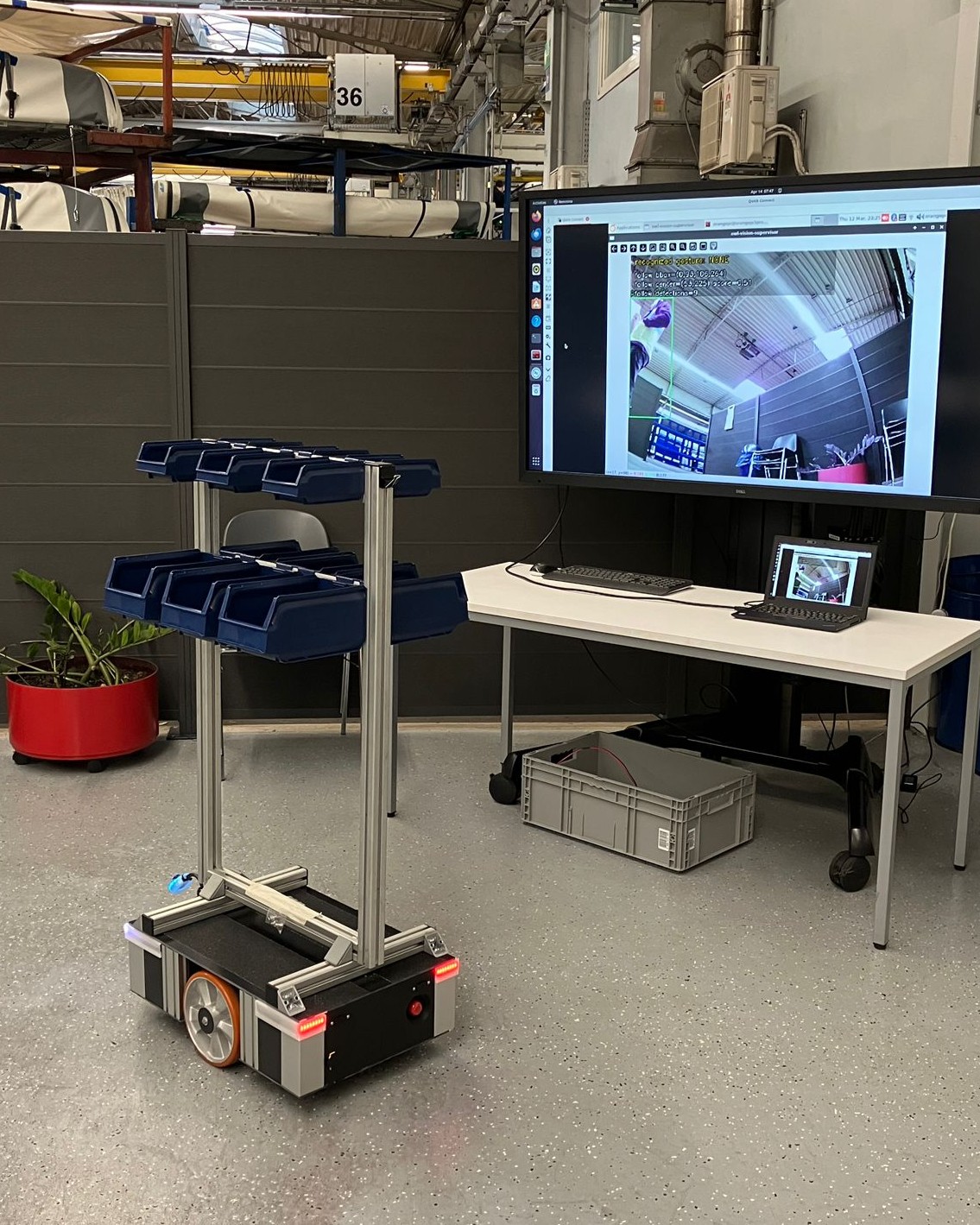
Ready-to-Use Robotics Modules
Modern robots rely on much more than motor control.
Vision systems, LiDAR, ultrasonic sensors, gesture recognition, and other intelligent components are essential building blocks of today's autonomous robots.
owlCore already provides ready-to-use modules for many of these technologies, including:
- Camera systems
- LiDAR sensors
- Ultrasonic sensors
- Gesture recognition
- IMU and motion sensors
- CAN communication
- Additional extension modules
Developers can immediately use these components without spending time integrating, configuring, and testing each individual device.
Focus on Innovation Instead of Hardware
One of the primary goals of owlCore is to remove unnecessary complexity from robotics development.
Instead of writing low-level drivers and communication layers, developers can focus entirely on the behavior and functionality of their robot.
This significantly reduces development time while making professional robotics more accessible for beginners, educational institutions, and experienced engineers alike.
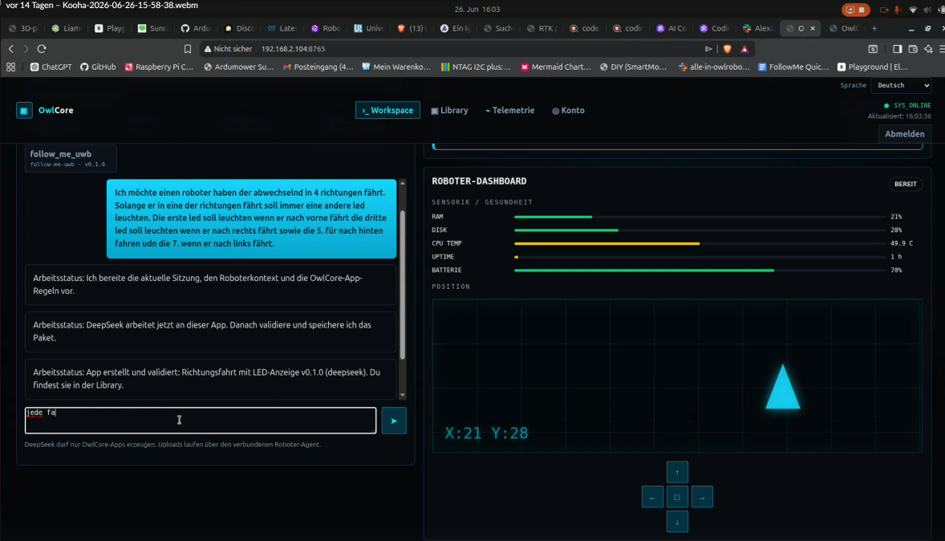
Designed for AI-Assisted Software Development
owlCore is not only designed for human developers.
Its modular architecture also provides an ideal foundation for AI-assisted software development.
Rather than generating low-level hardware code from scratch, AI systems can use existing owlCore modules as reliable building blocks, combine them into new applications, or generate intelligent extensions.
This approach offers several advantages:
- Faster software development
- Higher code quality
- Fewer implementation errors
- Improved maintainability
- Easier scalability
- Consistent software architecture
Instead of replacing developers, AI becomes a powerful engineering assistant that accelerates robotics development.
From Education to Industrial Robotics
Whether used in schools, universities, research laboratories, prototype development, or industrial automation, owlCore provides a scalable software foundation for autonomous mobile robots.
The same concepts, APIs, and function modules can be used throughout the entire development process—from the first educational robot to professional robotic systems.
The Philosophy Behind owlCore
We believe robotics should not be unnecessarily complicated.
owlCore hides hardware complexity behind clearly defined, reusable function modules that allow developers to concentrate on solving real-world problems instead of implementing low-level control software.
By combining hardware abstraction, modular software architecture, and AI-friendly interfaces, owlCore enables faster development, higher software quality, and greater flexibility across a wide range of robotic applications.
owlCore is the intelligent software foundation for the next generation of autonomous mobile robots.
- Projects & News
- Hits: 152