")
")
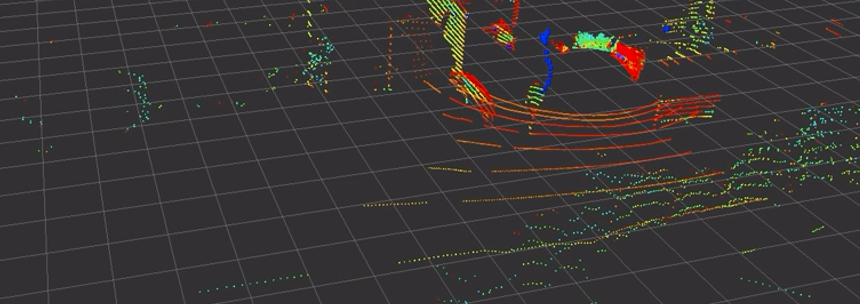
Person tracking with the LSLIDAR C16 LIDAR in the range above 20 meters
Task:
For a autonomic cleaning robot, the user must define easily and quickly a working, which the robot travels in lanes.
Approach;
Our preferred system for such a task, an exact 1-2cm accurate GPS-RTK navigation cannot be used here, as the cleaning system is also used in halls and covered areas. That's why we decided to use an LSLIDAR C16 LIDAR with a range of 120m, based on our SLAM, to realize indoor and outdoor navigation by tracking the way the user goes to define the area.
Problem:
With its 16 laser channels, the LSLIDAR C16 has a long range and is ideally suited to carry out an exact location determination and mapping of the environment via the SALAM software and also to monitor the robot's close working area for small and large obstacles. Due to its aperture angle, the first 8 laser beams emit at a +14° angle, the 8 lower laser beams at a -16° angle, which means that a fan of up to 16 beams hits the object, e.g. a person, at close range. As the distance of the person increases, less and less of the laser beams hit the person. Due to the opening angle, they hit the ground beforehand, which we need for navigation or they go over the person, which leads to the loss of point reflection. Even larger objects, such as people, are lost in the point cloud at a distance and the object is lost.
Solution:
Of course, an LSLIDAR with 32, 64 or 128 beams solves the problem perfectly, but leads to significantly higher costs for the overall project, especially since the LSLIDAR C16 basically covers the areas. The solution is our algorithm, which filters out the few reflection points from the moving object, cumulates them and thus determines the position of the object and can thus track its path.
This can be clearly seen in the video, how the algorithm finds and tracks the object despite decreasing reflections.