")
")
Robotik neu gedacht
Die Entwicklung autonomer Roboter ist oft komplex. Unterschiedliche Fahrwerke, Sensoren, Motorsteuerungen und Kommunikationsprotokolle machen jede neue Anwendung zu einem eigenen Entwicklungsprojekt.
Mit owlCore verfolgen wir einen anderen Ansatz.
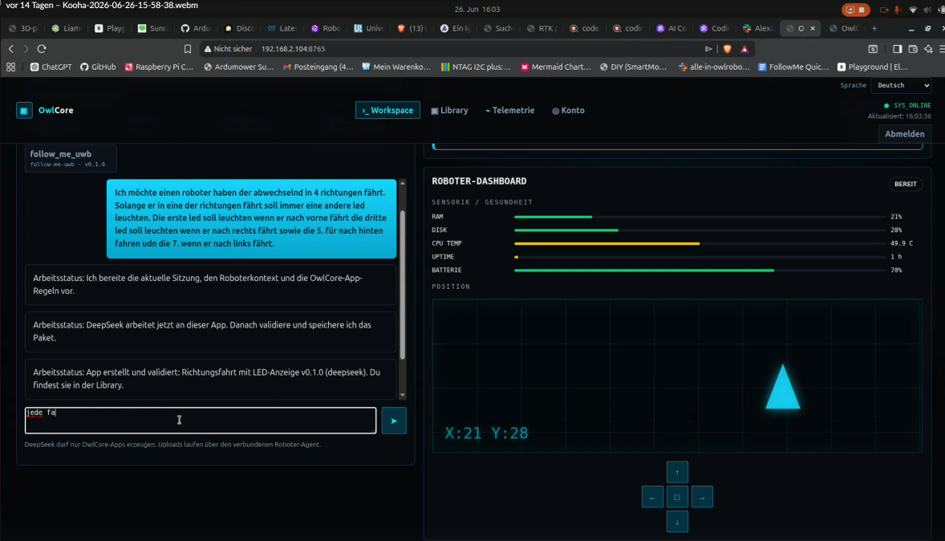
Anstatt dass sich Entwickler mit der Ansteuerung einzelner Motoren, Sensoren oder CAN-Nachrichten beschäftigen müssen, stellt owlCore eine einheitliche Sammlung intelligenter Funktionsbausteine bereit. Der Entwickler beschreibt lediglich was der Roboter tun soll – owlCore übernimmt wie dies auf der jeweiligen Hardware umgesetzt wird.
Von der Funktion zur Bewegung
Ein typisches Beispiel ist die Fahrzeugsteuerung.
Der Anwender gibt lediglich die gewünschte Geschwindigkeit und Fahrtrichtung vor. owlCore berechnet automatisch die erforderlichen Stellgrößen für das verwendete Fahrwerk.
Je nach Fahrzeugtyp übernimmt das Framework beispielsweise:
- Regelung der Motoren bei Differentialantrieben
- Berechnung des Lenkeinschlags bei Ackermann-Lenkungen
- Ansteuerung der jeweiligen Motorcontroller
- Kommunikation über den CAN-Bus
- Anpassung an unterschiedliche Hardwareplattformen
Die Anwendung bleibt dabei vollständig unabhängig vom eingesetzten Roboter.
Ein Framework für unterschiedlichste Robotersysteme
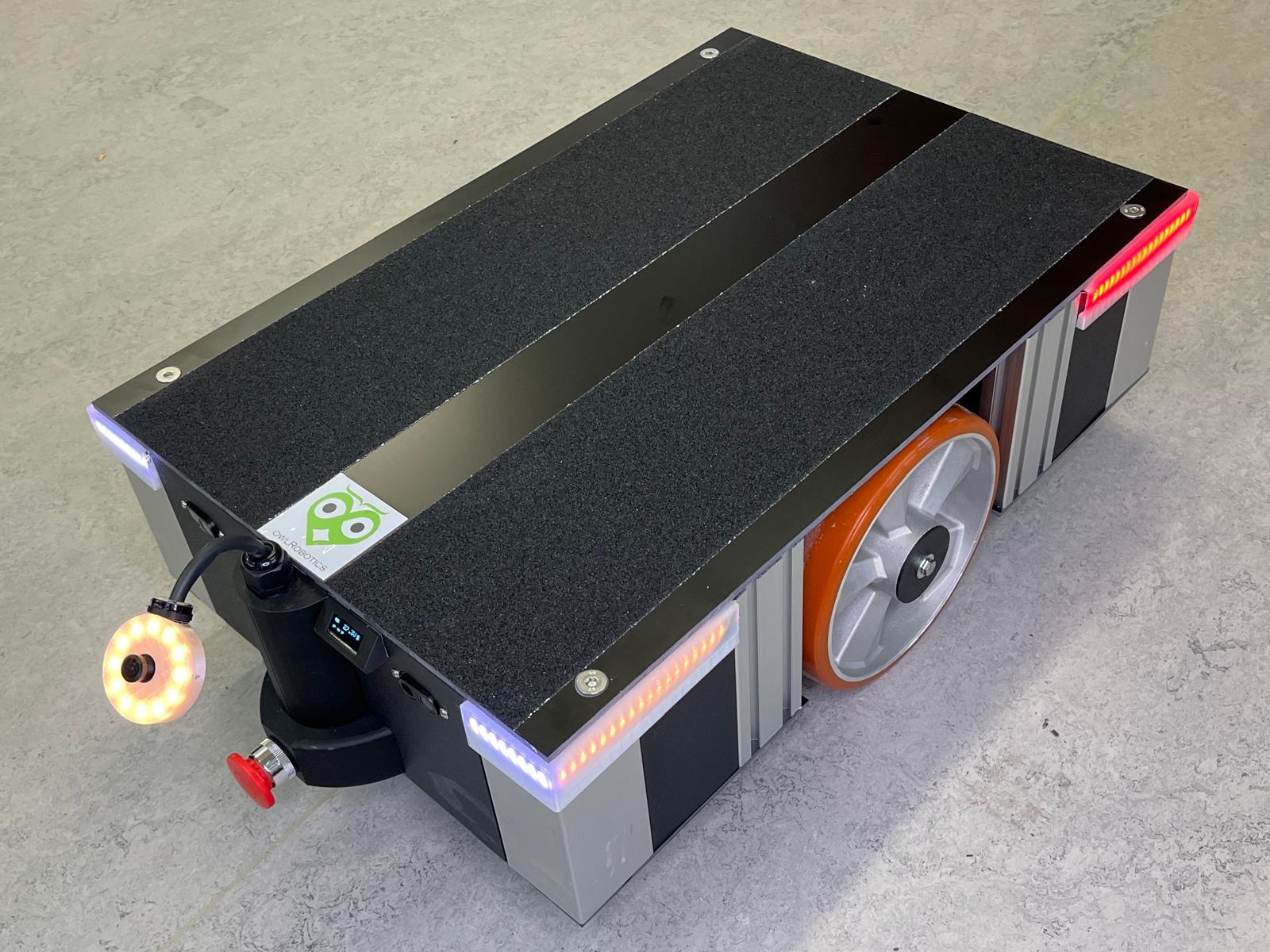
owlCore wurde für autonome mobile Roboter entwickelt und unterstützt unterschiedlichste Fahrzeugkonzepte.
Typische Einsatzgebiete sind:
- Rasenroboter
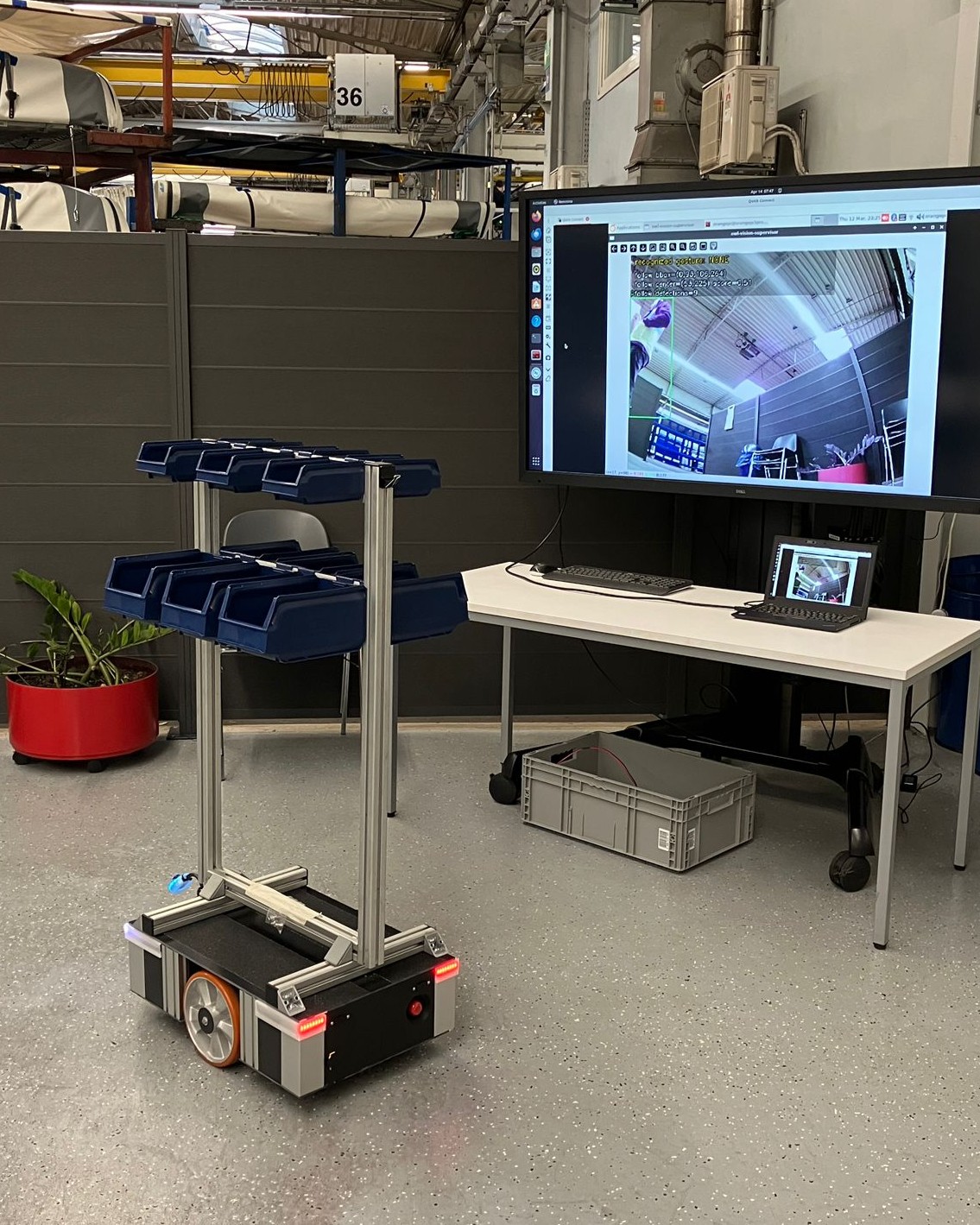
- Service- und Transportroboter
- Ausbildungs- und Forschungsplattformen
- Mobile Industrie- und Logistikroboter
- Individuelle Sonderfahrzeuge
Durch die klare Hardwareabstraktion kann dieselbe Software auf unterschiedlichen Robotern eingesetzt werden.
Sensorik sofort einsatzbereit
Moderne Robotik besteht längst nicht mehr nur aus Motoren. Kameras, LiDAR, Ultraschallsensoren oder Gestenerkennung gehören heute häufig zur Grundausstattung.
Deshalb stellt owlCore bereits fertige Module bereit, die direkt verwendet werden können.
Dazu gehören unter anderem:
- Kamerasysteme
- LiDAR-Sensoren
- Ultraschallsensoren
- Gestenerkennung
- IMU- und Bewegungssensoren
- CAN-Kommunikation
- weitere Erweiterungsmodule
Diese Komponenten müssen vom Anwender nicht erst integriert oder getestet werden. Stattdessen können sie sofort für eigene Anwendungen genutzt werden.
Weniger Technik – mehr Innovation
Ein zentrales Ziel von owlCore besteht darin, die technische Komplexität deutlich zu reduzieren.
Anstatt sich mit Treibern, Protokollen oder Hardwaredetails auseinanderzusetzen, konzentriert sich der Entwickler auf die eigentliche Anwendung.
Das verkürzt Entwicklungszeiten erheblich und erleichtert den Einstieg in die professionelle Robotik – sowohl für Einsteiger als auch für erfahrene Entwickler.
Optimiert für die Entwicklung mit Künstlicher Intelligenz
owlCore bietet nicht nur Vorteile für menschliche Entwickler.
Durch die klar definierten Funktionsmodule kann auch Künstliche Intelligenz wesentlich effizienter mit dem Framework arbeiten.
Anstatt hardwarenahe Programmteile neu zu erzeugen, greift die KI auf bestehende Module zurück und kombiniert diese zu neuen Anwendungen oder erweitert sie gezielt.
Dadurch entstehen mehrere Vorteile:
- schnellere Entwicklung
- höhere Softwarequalität
- weniger Fehler
- besser wartbarer Code
- einfachere Erweiterbarkeit
KI wird dadurch vom reinen Codegenerator zum intelligenten Entwicklungspartner.
Skalierbar vom Einstieg bis zur professionellen Anwendung
owlCore wächst mit den Anforderungen.
Ob erste Robotikprojekte in Schule und Ausbildung, komplexe Forschungsplattformen oder professionelle Industrieanwendungen – das Framework stellt dieselben Grundfunktionen bereit und ermöglicht einen nahtlosen Übergang zwischen den unterschiedlichen Einsatzbereichen.
Die Idee hinter owlCore
Wir sind überzeugt, dass Robotik nicht unnötig kompliziert sein muss.
Deshalb abstrahiert owlCore die technische Komplexität und stellt stattdessen leistungsfähige, wiederverwendbare Funktionsblöcke bereit.
So können Entwickler, Unternehmen, Bildungseinrichtungen und zukünftig auch KI-Systeme ihre Ideen schneller in funktionierende autonome Roboter verwandeln.
owlCore bildet damit das intelligente Fundament für die nächste Generation autonomer Robotik.
- Projects & News
- Zugriffe: 153