")
")
Our goal was to create a simple, compact, and practical test robot, ideal for use in an office or lab environment. The design is intentionally minimalistic—using only a few components, a fully functional robot can be built quickly.
Required Components
For the basic setup, you only need:
- owlStarter Kit
- 24 V battery
- e.g. GFRP plates (approx. 20 × 30 cm, 3 mm thick)
- freely rotating front wheel / caster
- a few screws and cables
- 3D-printed wheels
Mechanical Assembly
The overall dimensions of the robot and the choice of materials can be adapted to your needs. The only important consideration is that the construction should not be too heavy for the drive motors. If necessary, more powerful motors can of course be used.
First, mount the brackets for the geared motors onto the base plate.
There are two common mounting options:
- Rear-mounted motors (approx. 50 mm from the rear edge to the motor shaft center):
→ requires a freely rotating wheel or caster at the front. - Centrally mounted motors (e.g. for a round robot or symmetric driving in both directions):
→ requires two freely rotating casters, one at the front and one at the rear.
Next, drill a sufficiently large hole at a suitable position in the base plate to route the motor cables neatly.
Then print and mount the two wheels—this completes the basic mechanical assembly.

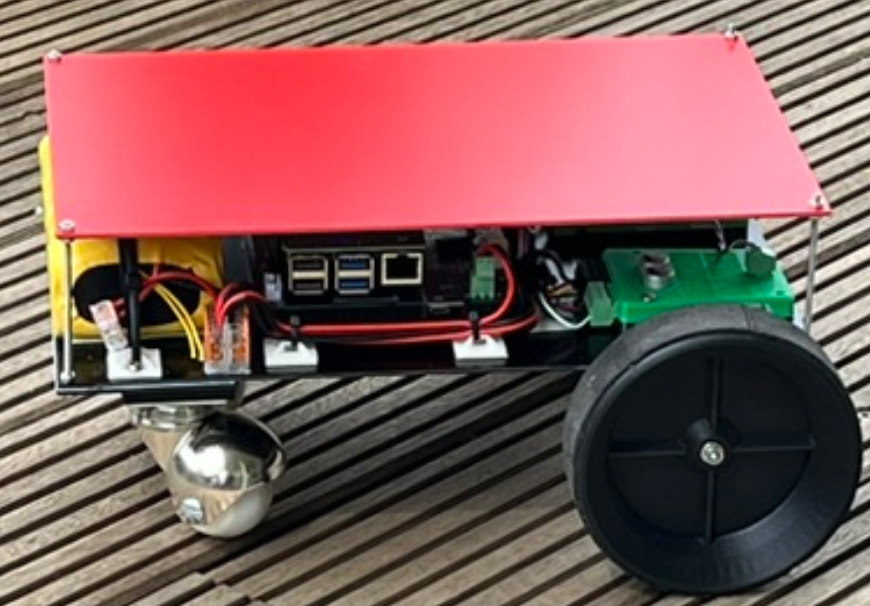
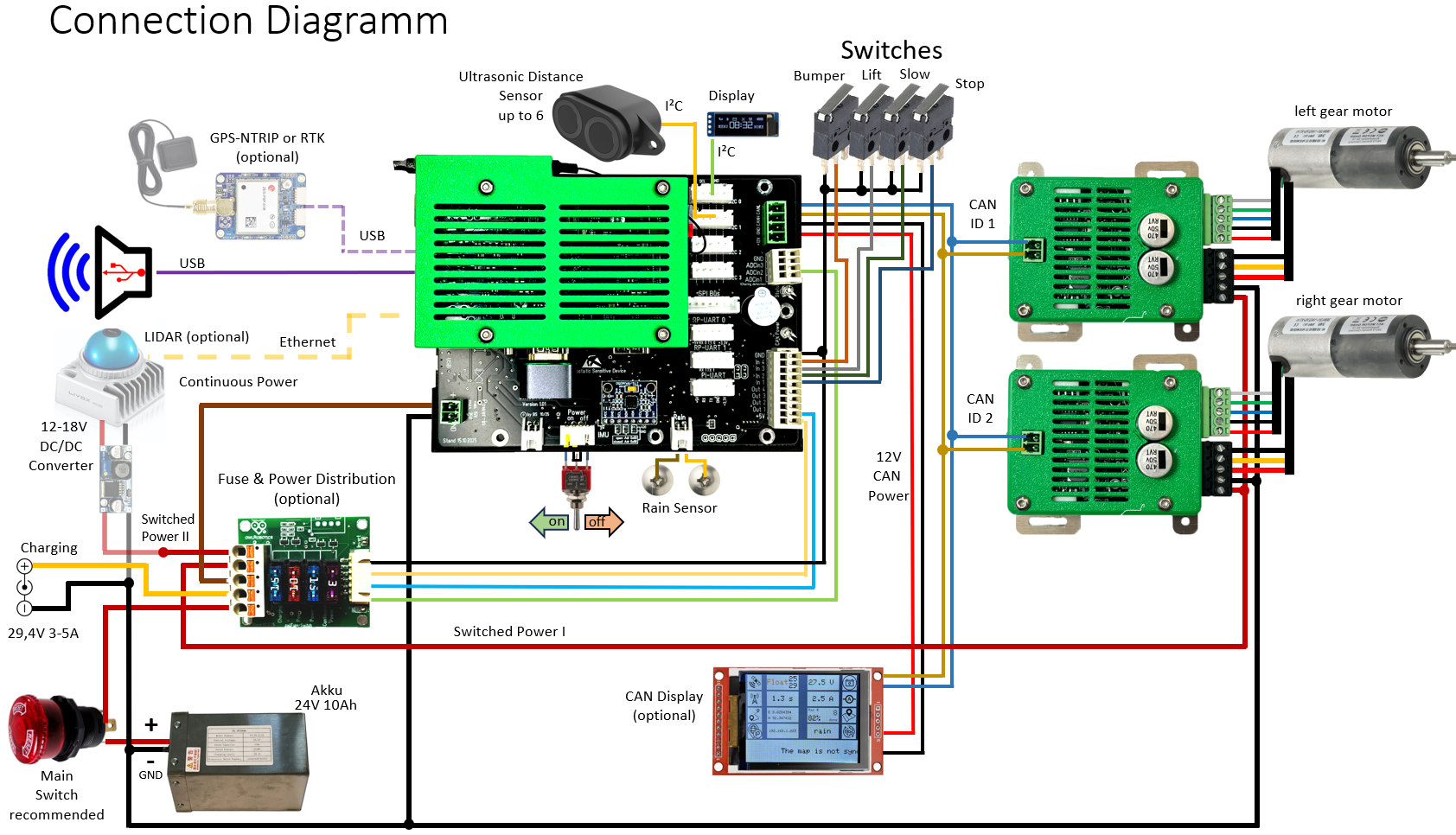
Electronics & Final Steps
Now mount the battery and electronics onto the base plate (using screws or double-sided tape) and connect the wiring.
At this point, the minimalist test robot is already operational.
In our setup, we additionally install a second cover plate, mounted with four threaded rods. This protects the electronics and provides mounting points for a camera and ultrasonic sensors.
Finally, install the software on the SD card, briefly configure the owlDrive motor drivers, and the test robot is ready to go.
Documentation & Support
We are currently preparing detailed documentation as well as step-by-step videos for this setup.
If you don’t want to wait, feel free to get started right away—and if you have any questions, just contact us via the contact form.
- Projects & News
- Zugriffe: 2747
