")
")
comming soon
- +49 (0)5772 560300
- info@owlrobotics.de
- Mon - Fri 8:00 - 17:00
Uncategorised
The owlRobotic Tool Kit consists of 3 main components, the drive, our owlDrive, the ROS based software, owlGuidance and the electronic hardware, owlControl. The individual components are described in the respective categories.
![]() Vielen Dank für ihren Einkauf
Vielen Dank für ihren Einkauf
3D LiDAR product finder
Download the latest version of the document as PDF here.
Depending on your specific application usage, we can assign your application to one or more of the following LiDAR scenarios:
- 3D Odometry
- Localization
- Mapping/3D scanning/ 3D measurement
- Object recognition
- Object tracking
- Obstacle detection
Product finder
This table summarizes the recommended owlRobotics LiDAR types and their typical usages. The LiDAR scenarios, recommended owlRobotics LiDARs, and recommended ROS software packages are explained in detail further below.
|
long range point clouds in fast motion |
long range, dense point clouds in fast motion |
dense point clouds in slow motion |
|
|
Recommended owlRobotics LiDAR |
LS LIDAR C8/ C16 * |
LS LIDAR C32 |
Livox MID 360 |
|
Max. recommended open space distance |
100 m |
100 m |
20 m |
|
Max. recommended sensor speed |
30 m/s |
30 m/s |
0.5 m/s |
|
Expectable localization accuracy |
1-5 cm |
1-5 cm |
1-5 cm |
|
Expectable mapping accuracy |
10-20 cm |
5-10 cm |
1-5 cm |
|
Min. detectable obstacle size |
0.3 m (near) - 1.0 m (far) |
0.3 m (near) - 0.3 m (far) |
0.1 m (near) - 0.3 m (far) |
|
Recommended usage |
|
|
|
* replaces RoboSense RS-HELIOS-16P, Velodyne Puck VLP-16, Ouster OS1-16 etc.
3D Odometry
LiDAR realtime odometry is the use of a LiDAR sensor to estimate the change in position over time. Using a 3D (360 degree) LiDAR for odometry typically results in very precise position change estimations. However, as no map is generated in this application, the position is always relative to the time you powered-on the LiDAR sensor (sensor initialization time is zero point). A 3D LiDAR will give you the following information relative to the starting time of the LiDAR:
- position in 3D space in meter (x, y, z) relative to LiDAR power-on time
- orientation in 3D angles (roll, pitch, yaw)
When recording this information over time, you will get a 3D trajectory (dotted line):

The following owlRobotics LiDAR sensors are recommended for 3D odometry. Because the LiDAR needs to find enough points, there is a limit on the maximum speed and the size of the maximum open area you can use it. The expected position accuracy depends on many factors (speed, size of open area etc.).
|
max. recommended sensor speed |
max. recommended open area |
expectable position accuracy |
|
|
Livox MID 360 |
1 m/s |
20m |
1-5 cm |
|
LS LIDAR C8/C16 |
30 m/s |
100m |
1-5 cm |
The following ROS software packages are recommended for 3D odometry:
|
Livox MID 360 |
|
|
LS LIDAR C8/C16 |
Localization
A LiDAR sensor can be used to realtime-localize the sensor in the 3D world which means to compute the position of the LiDAR in the world. For robust localization, a 360 degree LiDAR is recommended. For outdoor localization, a 3D LiDAR (360 degree) is a must-have. While moving the LiDAR, software will generate a map of the world and localize the LiDAR in this world (also called ‘Simultaneous Localization And Mapping / SLAM algorithm’). For localization, the LiDAR does not need to have many rays as no precise maps are required for localization. When the LiDAR sensor is restarted at another location in the world (also called ‘LiDAR kidnapping’), the software can find the new position of the sensor in the map. This feature is called ‘relocalization’. The generated maps used to localize the sensor are not metric-correct and because of that you will get a misalignment when e.g. moving in a circle-like motion on the ground. The software will detect this misalignment and correct it. This feature is called ‘loop-closure’.


The following owlRobotics LiDAR sensors are recommended for 3D localization. Because the LiDAR needs to find enough points, there is a limit on the maximum speed and the size of the maximum open area you can use it. The expected localization accuracy depends on many factors (speed, size of open area etc.).
|
max. recommended sensor speed |
max. recommended open area |
|
|
Livox MID 360 |
1 m/s |
20m |
|
LS LIDAR C8/C16 |
20 m/s |
100m |
The following ROS software packages are recommended for 3D localization:
|
Relocalization possible? |
Expectable localization accuracy |
Loop closure possible? |
||
|
Livox MID 360 |
no |
1-5 cm |
yes |
|
|
LS LIDAR C8/C16/C32 |
yes |
1-5 cm |
yes |
3D Mapping / 3D Object scanning / 3D Measurement
In mapping and scanning applications, the world is precisely measured to generate a 3D map of the world (or a 3D object). For precise mapping applications, the LiDAR should be able to 'shoot' at all points in the world. Often, for mapping applications, realtime is not required, and one can use 3D software (e.g. CloudCompare, MeshLab etc.) to improve the mapping results. A 3D LiDAR is required for outdoor applications and a 360 degree LiDAR helps to reduce the scanning time.

The following owlRobotics LiDAR sensors are recommended for 3D mapping. Because the LiDAR needs to find enough points, there is a limit on the maximum speed and the size of the maximum open area you can use it. The expected mapping accuracy depends on many factors (speed, size of open area etc.).
|
max. recommended sensor speed |
max. recommended open area |
expectable mapping accuracy |
|
|
Livox MID 360 |
0.5 m/s |
20m |
1-5 cm |
|
LS LIDAR C32 |
15 m/s |
100m |
5-10 cm |
The following ROS software packages are recommended for real-time 3D mapping:
|
Relocalization possible? |
Loop closure possible? |
||
|
Livox MID 360 |
no |
yes |
|
|
LS LIDAR C32 |
yes |
yes |
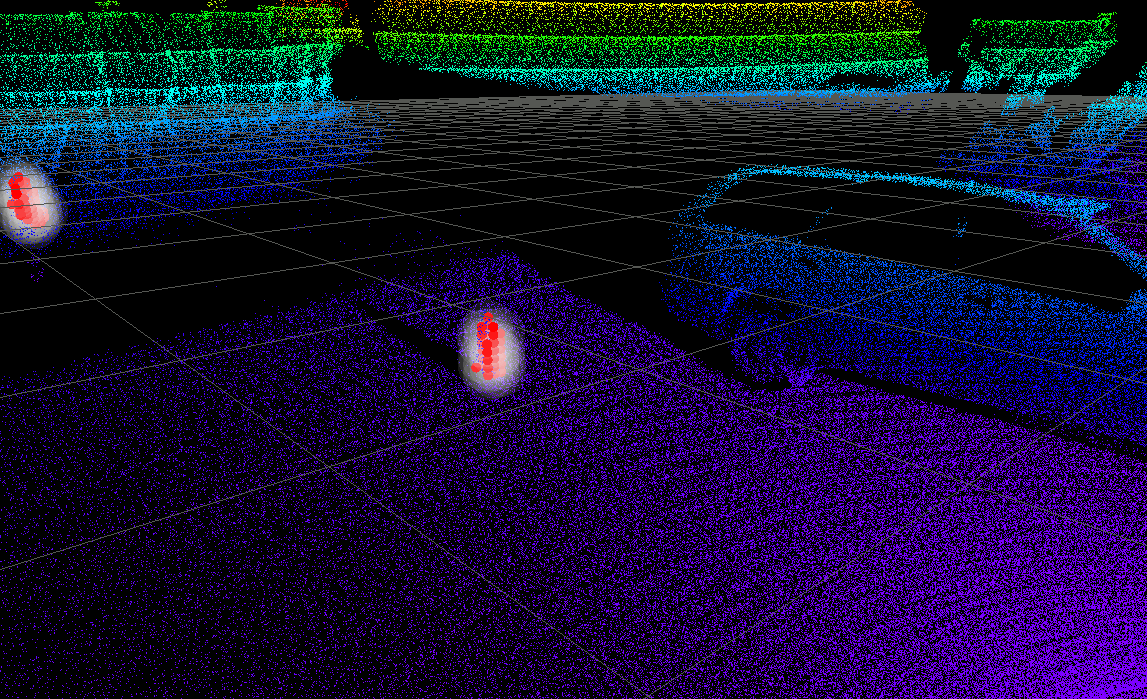
Object recognition/tracking and obstacle detection
A LiDAR sensor can be used to recognize and track objects or to detect obstacles. Example objects are people, cars, traffic signs etc. Because a LiDAR sensor cannot detect colors but instead can detect reflectivity strength, you can detect black and white patterns with it.
Depending on your application, you can identify objects by:
- size (width, depth, height)
- distance to ground (object height from ground)
- reflectivity (from back to white color)
- surrounding objects and points
- feature points (points with certain properties like belonging to a surface or edge points)
- 3D object templates (comparing point clusters with a point cloud template based on feature points, euclidean distance etc.)

Depending on motion speed of the sensor, the size of the object etc. we recommend the following owlRobotics LiDAR sensors for object recognition/tracking and obstacle detection:
|
Max. recommended sensor speed |
Min. object size expectable |
|
|
Livox MID 360 |
0.2 m/s |
0.2 m (near), 0.5m (far) |
|
Livox MID 360 |
0.5 m/s |
0.5 m (near), 1.0m (far) |
|
LS LIDAR C8/16 |
15 m/s |
0.5 m (near), 1.0m (far) |
|
LS LIDAR C32 |
15 m/s |
0.2 m (near), 0.5m (far) |
The following software ROS packages are recommended for 3D obstacle detection, object detection and tracking:
|
PCL (Point Cloud Library) |
|
|
PCL (ROS) |
Your project is our spirit
Tell us what you need for your project - owlRobotics can help with Open Source software as well has developed proprietary software that can be used and adopted on request - examples:
- Object detection (traffic cones etc.) and LiDAR odometry (Livox MID 360) https://www.youtube.com/watch?v=r4irRZcBTy8
https://www.youtube.com/watch?v=Vv_SAqXiNP4 - Moving object (persons etc.) tracking (LSLIDAR C16)
https://www.youtube.com/watch?v=N8ziA8BsCNk
https://www.youtube.com/watch?v=J9Z_Dh7w2zw - Localization (LSLIDAR C16)
https://www.youtube.com/watch?v=BIVYWe2SjLY
https://www.youtube.com/watch?v=XMt8soaGbpQ
https://www.youtube.com/watch?v=CcamlQFkaog
https://www.youtube.com/watch?v=Dh_WT0Na0mA
https://www.youtube.com/watch?v=v2qZtLXayS8 - Obstacle and ground detection (LSLIDAR C16)
https://www.youtube.com/watch?v=S-Qs9OPLtkc
- Bernd
- Uncategorised
- Hits: 5545
Consulting-Partnerschaft für innovative LiDAR-Technologie in Deutschland
OwlRobotics GmbH und LSLIDAR:
Espelkamp, Deutschland - OwlRobotics, ein aufstrebendes Startup für Lokalisierungs- und Steuerungssoftware von selbstfahrenden Robotern mit GPS RTK und LIDAR-Technologie, hat eine spannende Kooperation mit LSLIDAR (Leishen Intelligent System Co., Ltd.), einem innovativen Hersteller von laserbasierten Sensoren, bekannt gegeben. Das gemeinsame Ziel ist es, deutschen Kunden eine umfangreiche Auswahl hochwertiger LiDARs als Komplettlösungen anzubieten und sie bei der erfolgreichen Integration dieser Technologie in ihre Produkte zu unterstützen.
OwlRobotics hat sich als Experte für präzise Navigationsalgorithmen und Roboterbetriebssysteme wie ROS einen Namen gemacht. Das Unternehmen aus Espelkamp bietet umfangreiche Erfahrung und Beratung für Kundenprojekte in verschiedenen Branchen. Mit innovativen Hard- und Softwarelösungen für autonom agierende Roboter hat sich OwlRobotics einen Ruf für innovative Lösungen erarbeitet.
LSLIDAR, mit Hauptsitz in Shenzhen, China, ist ein innovativer Anbieter von hochwertigen LiDAR-Sensoren und einem umfassenden Portfolio an LiDARs für verschiedenste Anwendungsfelder. Das Unternehmen hat sich als Vorreiter in der Branche etabliert und bedient führende Branchen wie autonomes Fahren, Kartierungssysteme, Logistik und intelligente Sicherheit.
Durch die Partnerschaft zwischen OwlRobotics und LSLIDAR erhalten deutsche Kunden Zugang zu hochwertigen LiDAR-Produkten mit exzellentem Preis-Leistungs-Verhältnis und umfassendem Support. OwlRobotics wird eng mit den Kunden zusammenarbeiten, um Vertriebsberatung, Consulting Services und nahtlose Softwareintegration anzubieten und so eine erfolgreiche Integration der LSLIDAR-Technologie sicherzustellen.
Autonomes Fahren, präzise Kartierungssysteme und effiziente Logistik sind nur einige Beispiele für die vielfältigen Anwendungsmöglichkeiten von LiDAR-Technologie. Durch die Partnerschaft zwischen OwlRobotics und LSLIDAR können nun auch deutsche Kunden die Vorteile dieser fortschrittlichen Technologie nutzen und ihre Projekte vorantreiben.
Besuchen Sie die Website von OwlRobotics (owlrobotics.de) und LSLIDAR (lslidar.com), um weitere Informationen über die Produkte und Dienstleistungen zu erhalten und herauszufinden, wie sie Ihnen bei Ihren spezifischen Anforderungen behilflich sein können.
About owlRobotics GmbH
owlRobotics GmbH stands for high precision navigation algorithms for self driving robots like lawn mowers and similar vehicles, based on our Sunray-OS or open standards.
Latest News
Testbed of the owlRobotics Kit
21 March 2024
Mecanum Drive with our owlDrive
14 March 2024